
Senior project
D.O.G.S.: A Robotic Solution for Dog Waste Collection in a Service Dog Facility
Robert Collins, S.B. ’20, mechanical engineering
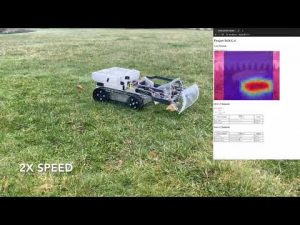
Collins partnered with The Service Dog Project, a service dog training facility in Ipswich, Mass., to develop a robot that is able to collect dog waste in a portion of the facility that is often used for dog training and exercise. His “Device fOr Gathering Stool” (D.O.G.S.) is a rover designed to move around the rough terrain of the facility, and includes a large scoop to collect waste and a payload base to store it. Collins also built a basic control system that uses an onboard Raspberry Pi computer to allow an operator to control the rover remotely. In addition, Collins showed how his rover could be made autonomous with the use of additional software and by fitting a camera and thermal imaging sensor to the rover. For Collins, the biggest challenge of the project was limiting the scope so he could realistically finish his work within the ES 100 time frame.
“I learned a great deal from this project. The project had a lot of electronic and software components that I didn’t have experience with. I had never built a robotic system like this from the ground up, so I had to do a lot of research and learn new things along the way,” he said. “In addition, the project was a great learning experience in project management and how to set realistic expectations and break up work into manageable chunks.”
Most Recent News
Former Victoria man’s diabetic alert dog helps him get back to life
 When Luke Hengen’s diabetes worsened in his early twenties, it stripped him of the outdoor activities where the country kid felt at home. Countless wilderness adventures and years of hard-fought football games took a toll on his body, to the point where he could no longer sense when his blood sugar was too high or […]
When Luke Hengen’s diabetes worsened in his early twenties, it stripped him of the outdoor activities where the country kid felt at home. Countless wilderness adventures and years of hard-fought football games took a toll on his body, to the point where he could no longer sense when his blood sugar was too high or […]
Students Get Therapy Dog
 When middle school students return to class on Jan. 11, they’ll find a new face at the door: Daisy. Daisy is a therapy dog and the personal pet of Rob Kreger, principal of the Rock L. Butler Middle School. The five-year-old golden retriever is not a school pet or mascot, but rather a working dog […]
When middle school students return to class on Jan. 11, they’ll find a new face at the door: Daisy. Daisy is a therapy dog and the personal pet of Rob Kreger, principal of the Rock L. Butler Middle School. The five-year-old golden retriever is not a school pet or mascot, but rather a working dog […]
Therapy Dogtor
 Last March, Caroline Benzel, a third-year medical student, began to notice the stress and discomfort her nurse friends were feeling from the pressures of the ongoing Covid-19 pandemic. “[Personal protective equipment] can be really rough on the skin,” Benzel, 31, tells PEOPLE. Benzel and her 3-year-old Rottweiler, Loki (who’s also a therapy dog) hatched a […]
Last March, Caroline Benzel, a third-year medical student, began to notice the stress and discomfort her nurse friends were feeling from the pressures of the ongoing Covid-19 pandemic. “[Personal protective equipment] can be really rough on the skin,” Benzel, 31, tells PEOPLE. Benzel and her 3-year-old Rottweiler, Loki (who’s also a therapy dog) hatched a […]
Therapy Dog Pups
 When Stanley the miniature fox terrier’s owner passed away, the little dog started a ‘paw-some’ new role – bringing puppy love to some of the Gold Coast’s oldest residents. After Carinity Cedarbrook Diversional Therapist Julianne Staff adopted Stanley, he began visiting the aged care community at Mudgeeraba as a therapy dog. Therapy dogs help to […]
When Stanley the miniature fox terrier’s owner passed away, the little dog started a ‘paw-some’ new role – bringing puppy love to some of the Gold Coast’s oldest residents. After Carinity Cedarbrook Diversional Therapist Julianne Staff adopted Stanley, he began visiting the aged care community at Mudgeeraba as a therapy dog. Therapy dogs help to […]
Puppy Cams
 A nonprofit is providing an unusual form of therapy for those on the front lines of the coronavirus pandemic – puppy cams! “You spend five minutes with a puppy and try not to smile,” said registered nurse Robin Lingg Lagrone. Lingg Lagrone says watching little furballs wag their tails and prance on their paws helps […]
A nonprofit is providing an unusual form of therapy for those on the front lines of the coronavirus pandemic – puppy cams! “You spend five minutes with a puppy and try not to smile,” said registered nurse Robin Lingg Lagrone. Lingg Lagrone says watching little furballs wag their tails and prance on their paws helps […]
Pet Committee
 When Moore County’s school doors were abruptly closed earlier in 2020, two- and four-legged volunteers from the Moore County Citizens’ Pet Responsibility Committee (PRC) were in their 12th year of presenting a six-session Pet Responsibility Education Program for fourth-graders. The PRC quickly shifted gears and placed its program materials online as part of a home […]
When Moore County’s school doors were abruptly closed earlier in 2020, two- and four-legged volunteers from the Moore County Citizens’ Pet Responsibility Committee (PRC) were in their 12th year of presenting a six-session Pet Responsibility Education Program for fourth-graders. The PRC quickly shifted gears and placed its program materials online as part of a home […]